上海西门子200CN热电阻输入模块






- ¥186.00 ≥ 1台
- 2023-10-02 11:42:58
- 西门子200CN热电阻输
- 上海地友自动化设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
上海西门子200CN热电阻输入模块上海西门子200CN热电阻输入模块 在“继电器与器“型电路中,用梯形图编程会显得一目了然,犹如看电气连接图一般。二、功能块图FBDFBD用方框图的形式来表示控制逻辑,类似于数字逻辑门电路的编程语言。驼子在大学时,对数字电路情有钟,因而后来对FBD语言有了天然的好感,工作中倾向于用FBD进行编程。 ①变量存储器(V)的标注。变量存储器用字母V标识,用来存储全局变量,可用于存放程序执行中控制逻辑操作的中间结果等。同一个存储器可以在任意程序分区被访问。②局部变量存储器(L)的标注。局部变量存储器用字母L标识,用来存储局部变量,同一个存储器只和特定的程序相关联。 的目的)下面举个例子说明多重背景数据的使用:前面我们建立了一个FB1(电机的启停控制),如果我们想控制很多电机的话就要在OB1内多次调用FB1,然而每个CPU支持调用FB数目是有限的,这边FB1(电机启停功能)用的多,就代表我们其他功能的F。 如:T40。定时器的编号包含两方面的变量信息:定时器位和定时器当前值。定时器位即定时器触点,与其他继电器的输出相似。当定时器的当前值达到设定值PT时,定时器的触点。定时器当前值即定时器当前所累计的时间值,它用16位符号整数来表示计数值为32767。
本文仅为展示口通讯和中断,如果想要实现这两个PLC的通讯其是使用向导进行以太网通讯,有机会我们也会进行讲解!)
通信任务:CPU1 每秒触发一次 XMT 指令将 CPU 的实时时钟发送到 CPU2;CPU2 接收到 CPU1 发送的信息后立即将 CPU2 的实时时钟回复到 CPU1。
接线:每个 S7-200 ART CPU 都提供一个以太网端口和一个 RS485 端口(端口0),型 CPU 额外支持 CM01 板(端口1),板可通过 STEP 7-Micro/WIN ART 组态为 RS232 通信端口或 RS485 通信端口。
上海西门子200CN热电阻输入模块上海西门子200CN热电阻输入模块 可以计算出,该定时器的定时时间为300×100ms=30000ms=30s;则在该程序中,当输入继电器I0.3闭合后,定时器T37得电,延时30s后控制输出继电器Q0.0的延时闭合的常开触点T37闭合,使输出继电器Q0.0线圈得电。 通过集成RC装置或集成电容来传导高频电流,并且会静电荷。尽管使用接地安装导轨,但由于高阻型RC连接,将S7-1500自动化/ET200MP分布式I/O的参考电位视为未接地。()var_hmt=_hmt||[];()();。 我分别用硬件CPU1516-N/DP和plc与FB“被控对象”组成虚拟的PID闭环,都成功地实现了PID参数自整定。在PID整定窗口设置采样时间为0.3s,预调节之前PID的增益为0.3,积分时间为3s,微分时间为0s。 和硬件列表1、S7-200CPU,实验型号:CPU224XPCN2、电脑,已经安装好STEP7MicroWin和WINCCV6.23、编程适配器PCADAPTER订货号:6ESCB20-0XA04、PCACCESSV1.01,并安装到电脑上。

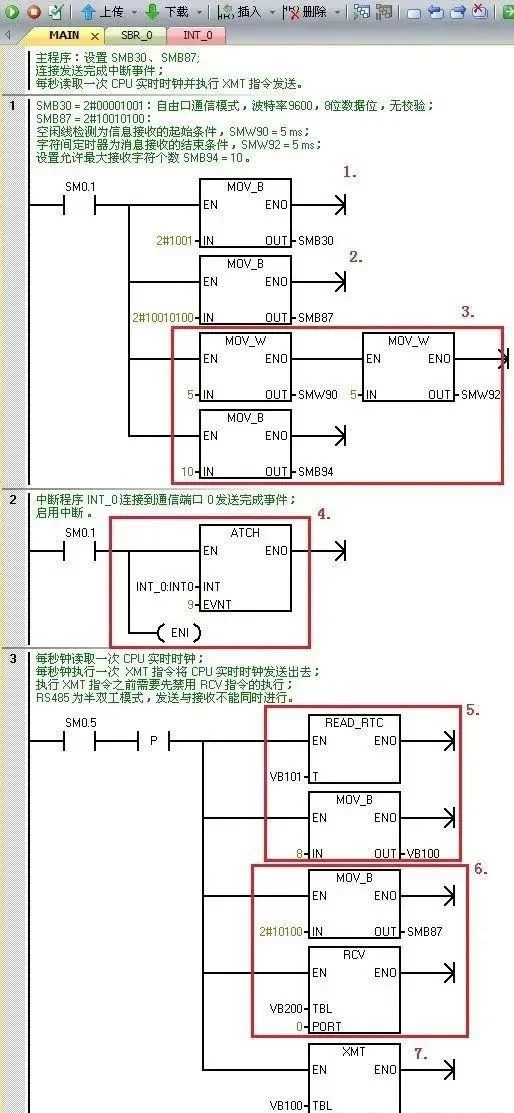
CPU1主程序
程序讲解:
2. 设置 B87 = 2#10010100,使用空闲线检测为信息接收的起始条件,使用字符间定时器为信息接收的结束条件。
3. 设置空闲线定时器 W90 = 5 ms,字符间定时器 W92 = 5 ms,允接收字符个数 B94 = 10。
4. 连接中断子程序 INT_0 到通信端口 0 发送完成事件,并启用中断。
5. 每秒钟读取一次 CPU 的实时时钟,并将发送缓冲区长度设置为 8 个字符。
6. 执行 XMT 指令之前设置 87.7 = 0,同时执行 RCV 指令,终止消息接收。
7. 每秒钟执行一次 XMT 指令将 CPU 的实时时钟发送出去。
1.2、 CPU1 发送完成中断子程序 INT_0 编程
中断子程序INT_0用于恢复 B87 的设置(87.7 = 1)
上海西门子200CN热电阻输入模块上海西门子200CN热电阻输入模块 你说的交流电源供电时的s7-200,就是指模块上有L和N交流电源接入端的模块,它接入的是交流220v电源,而直流供电时的s7-200,就是指模块上有24v+和24v-直流电源接入端的模块,它接入24v直流电源。 西门子S7-1500CPUIO设备的诊断功能(与1200完全相同),可使用DeviceStates和ModuleStates指令对分布式IO设备的站状态和子模块进行诊断。本文使用1214CV4.0CPU和ET200SP的PN通信为例进行说明(DP通信同样适用)。 随着西门子S7-1500plc越来越广,其应用也越来越多,跟大家分享S7-1500PROFINET与IOdevice通信。PROFINETIO设备指分配给一个或多个IO控制器的分布式现场设备(例如,远程IO、阀岛、变频器和交换机等)。 1---SF指示灯用于这8个AO通道中,任意一个AO通道的指示。指示范围包括任意一个AO通道输出超限(超上/下限),或任意一个AO通道外部接线端口开路(即断线)。2---所以S始终亮,说明要么有AO通道输出超限,要么有AO通道外部接线端口开路。

刷新
翻看
我
关注
搜索
有多少工程师不会: 西门子PLC口通讯+中断




在一些特定,比如说与系列伺服驱动器的控制时,为了数据的安全,我们需要进行多次往返的数据交换,这就需要严格控制通讯的时间。那么这个时候对于PLC来说通讯就是重要的,所以我们需要打断PLC的正常功能,处理通讯,这就需要通讯中断。
实例:2台S7-200 ART CPU(端口0)采用口通信实现相互通信

数控车床沈阳车床厂-制造车床,技术,精度高,,价格合理,使用寿命长!^^数控车床车床:1...(本文仅为展示口通讯和中断,如果想要实现这两个PLC的通讯其是使用向导进行以太网通讯,有机会我们也会进行讲解!)
通信任务:CPU1 每秒触发一次 XMT 指令将 CPU 的实时时钟发送到 CPU2;CPU2 接收到 CPU1 发送的信息后立即将 CPU2 的实时时钟回复到 CPU1。
接线:每个 S7-200 ART CPU 都提供一个以太网端口和一个 RS485 端口(端口0),型 CPU 额外支持 CM01 板(端口1),板可通过 STEP 7-Micro/WIN ART 组态为 RS232 通信端口或 RS485 通信端口。
CPU 通信端口引脚分配
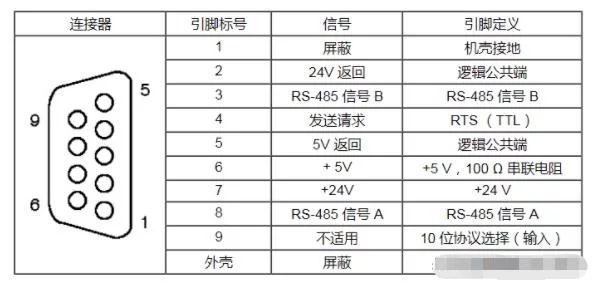
生产级iec61850就地模块、103就地模块,电力调度规约转换器。 ^^服务至上,终身联系:183291...1、CPU1 编程
1.1、CPU1 主程序编程如图 所示:
企企通采购网化工网,各行业网上交易平台,汇集名优企业买家询盘,实时!^^提供化工网资讯,中小...CPU1主程序
程序讲解:
2. 设置 B87 = 2#10010100,使用空闲线检测为信息接收的起始条件,使用字符间定时器为信息接收的结束条件。
3. 设置空闲线定时器 W90 = 5 ms,字符间定时器 W92 = 5 ms,允接收字符个数 B94 = 10。
4. 连接中断子程序 INT_0 到通信端口 0 发送完成事件,并启用中断。
5. 每秒钟读取一次 CPU 的实时时钟,并将发送缓冲区长度设置为 8 个字符。
6. 执行 XMT 指令之前设置 87.7 = 0,同时执行 RCV 指令,终止消息接收。
7. 每秒钟执行一次 XMT 指令将 CPU 的实时时钟发送出去。
1.2、 CPU1 发送完成中断子程序 INT_0 编程
中断子程序INT_0用于恢复 B87 的设置(87.7 = 1),并执行 RCV 指令开始接收 CPU2的应答信息。程序如图4. 所示:
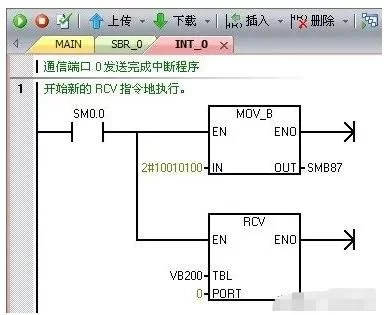
CPU1 中断子程序 INT_0
2、CPU2 编程
2.1、CPU2 主程序编程如图所示:
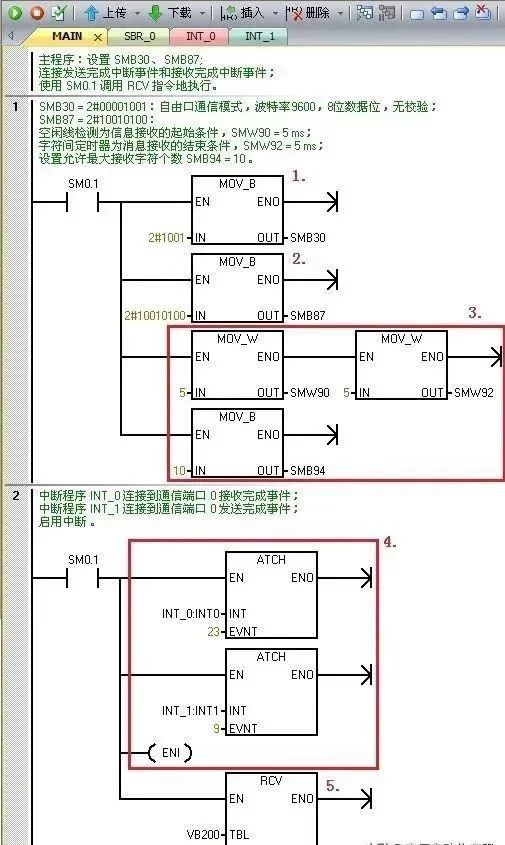
肖卡特热收缩膜包装机,型号,适配不同的需求.产品节能环保,可靠.^^肖卡特热收缩膜包装机,多层次售后服务体系...CPU2主程序
2. 设置 B87 = 2#10010100,使用空闲线检测为信息接收的起始条件,使用字符间定时器为信息接收的结束条件。
3. 设置空闲线定时器 W90 = 5 ms,字符间定时器 W92 = 5 ms,允接收字符个数 B94 = 10。
4. 连接中断子程序 INT_0 到通信端口 0 接收完成事件,中断子程序 INT_1 到通信端口 0 发送完成事件,并启用中断。
5. 使用 0.1 调用 RCV 指令地执行。
2.2、 CPU2 接收完成中断子程序 INT_0 编程
中断子程序INT_0用于读取 CPU 实时时钟,并调用 XMT 指令将实时时钟信息发送出去。程序如图所示。
上海西门子200CN热电阻输入模块 你说的交流电源供电时的s7-200,就是指模块上有L和N交流电源接入端的模块,它接入的是交流220v电源,而直流供电时的s7-200,就是指模块上有24v+和24v-直流电源接入端的模块,它接入24v直流电源。 1、STEP7安装概要STEP7安装程序可自动完成安装。通过菜单可控制整个安装。可通过Windows2000/XP/Server2003安装程序执行安装(如图1所示)。图1STEP7V5.4界面STEP7安装的主要步骤为:(1)将数据到编程设备中;(2)组态EPROM驱动程序;(3)安装许可证密钥(如果需要)。 先谢谢各位了答:可有二种方案实现:1、用硬件电路实现将输入的4-20mA电流转成0-5V或0-10V电压,见下电路图:该电路输入为:4~20mA,其输出受K1开关控制:(1)、当K1开关置断开位时,其输出为:0~10V电压。 如果达写入/的90%,则的数据保留时间将缩减至1年。如果达写入/,则无法所保存数据的保留时间。七、使用SIMATIC存储卡的注意事项1、执行写入操作时,请勿移除SIMATIC存储卡。

刷新
翻看
我
关注
搜索
西门子1200和1500在功能上的区别
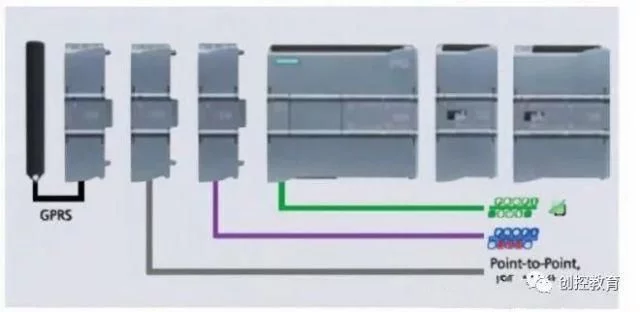
数控车床沈阳车床厂-制造车床,技术,精度高,,价格合理,使用寿命长!^^数控车床车床:1...S7-1200PLC
以完全替代原有S7-200系列PLC;
从功能上基本可以完全替代一部分低端的S7-300PLC;
从运算速度上超过S7-200PLC,与S7-312,S7-31LC接近;
远程I/O拓展能力非常强大;
性价比在相同层次控制器中;
通讯能力与工艺拓展能力显著。
S7-1500PLC
可以完全替代原有S7-300/400系列PLC;
通讯,编程指令丰富,编程灵活方便性,拓展性等各方面均大大;
运行速度,带负载(如:轴)控制能力大大。
功能特点
S7-1200主要功能特点介绍
通讯功能:
S7-1200提供各种各样的通信选项以大部分网络通讯邀请。
1.PROFINET通讯
同时集成的PROFINET接口支持以下协议:
TCP/IP
ISO/IP
S7 通信(端)
2.PROFIBUS
3.RS232/485/422串口通信
4.USS通信
5.Modbus RTU
6.远程通讯功能
生产级iec61850就地模块、103就地模块,电力调度规约转换器。 ^^服务至上,终身联系:183291...工艺功能:
(1)高速计数器
提供了多6个高速计数器,其于CPU的扫描周期进行计数及测量输入的。
(2)PID功能
用于对闭环控制PID控制,适用于温度,压力,流量等物理量。S7-1200CPU提供了PID控制器回路数量受到CPU的工作内存及支持DB快数量显著。严格上说没有具体数量,单实际应用推荐客户不要超过16路PID回路。
上海西门子200CN热电阻输入模块上海 在一个老CPU中,也用到DP,要在一个双字中取某位显示状态,不支持用CFC编程,所以无法瓜式的取到了,只能手工其中的bit位了。这时竟然字中高字节与低字节的对应关系,自己把自己晕了半天,后来回顾了下,终于搞明白了,看来瓜的编程是把自己弄得更瓜。 可以说,能够熟练运用STL编程的小伙伴,siemens的PLC一定玩的相当的溜。驼子我的STL编程仍处在初学者阶段,犹记得去年用STL编写过一段光电测距仪的接口程序,不知死了多少脑细胞,实在是不堪回首。 10.退出子程序。置HSC1的预置值为50。当HSC1的当前值=预置值时,执行INT_0。全局中断允许。执行HSC1,执行HSC1,HSC1的初始值、选择写入新的初始值和HSC1使能。图1西门子PLC梯形图中的输入继电器2、输出继电器(Q)的标注西门子PLC梯形图中的输出继电器用“字母Q+数字”进行标识,每一个输出继电器均与PLC的一个输出端子对应,用于控制PLC外接的负载。 扩展单元正常工作需要+5VDC工作电源,此电源由CPU通过总线连接器提供,扩展单元的24VDC输入点和输出点电源,可由基本单元的24VDC电源供电,但要注意基本单元所提供电流能力。CPU221无I/O扩展能力;CPU222多可连接2个扩展模块(数字量或模拟量);CPU224和CPU226多可连接7个扩展模块。

工艺功能:
(1)高速计数器
提供了多6个高速计数器,其于CPU的扫描周期进行计数及测量输入的。
(2)PID功能
用于对闭环控制PID控制,适用于温度,压力,流量等物理量。S7-1200CPU提供了PID控制器回路数量受到CPU的工作内存及支持DB快数量显著。严格上说没有具体数量,单实际应用推荐客户不要超过16路PID回路。
(3)运动控制
S7-1200运动控制根据连接驱动不同,分成三种控制
1.通过PROFIdrive或其他通讯控制驱动器;
2.通过模拟量输出控制器;
3.通过发送PTO脉冲的控制驱动器,多4个驱动器。
上海西门子200CN热电阻输入模块 查看DiagnosticBuffer中显示的信息是模块故障恢复,如图4所示。图4:OB83冗余电源故障恢复后的CPU诊断信息注意:由上述内容,我们可以看出,冗余电源设计和非冗余电源设计两种情况下,所调用的OB块是不一样的。 2、设置PG/PC接口安装STEP7期间,将显示一个对话框,可以将参数分配给PG/PC接口,也可以在STEP7程序组中调用"设置PG/PC接口",在安装后打开该对话框。这样可以在安装以后修改接口参数,而与安装无关。 步进电动机不能直接接到直流或交流电源上工作,使用的驱动电源(步进电动机驱动器)。控制器(脉冲发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲来控制电机转动的速度和加速度,从而达到调速的目的。 10.退出子程序。置HSC1的预置值为50。当HSC1的当前值=预置值时,执行INT_0。全局中断允许。执行HSC1,执行HSC1,HSC1的初始值、选择写入新的初始值和HSC1使能。()var_hmt=_hmt||[];()();。

S7-1500控制功能比S7-1200更强大
S7-1500:
1.外部编码器,输出凸轮,测量输入
2.速度和位置轴
3.相对同步
4.集成PID控制
5.高速计数,PWM,PTO输出
(工艺模块)
6.同步,凸轮同步
S7-1200:
1.速度和位置轴
2.集成PID控制
3.高速计数,PWM,PTO输出
上海西门子200CN热电阻输入模块 通过CP243-2AS-i通信处理器,S7-200CPU可以作为AS-i的主站,多可以连接62个AS-i从站,接入496个远程数字量输入/输出点。5、S7-200的编程STEP7-Micro/WIN32是为S7-200设计的在个人计算机Windows操作下运行的编程。 EM277PROFIBUS-DP从站模块用于将S7-200CPU连接到PROFIBUS-DP网络。通信速率为Mbit/s。通讯模块CP243-1的通信速率为10Mbit/s或100Mbit/s,半双工/全双工通信,RJ-45接口使用TCP/IP协议。 至少有一个IO设备/DP从站的第n位设置为“1”。·位n=1:通过MODE选择的状态将应用到IO设备/DP从站。o对于PROFINETIO,第n位对应于相应IO设备的设备编号(络视图中的PROFINET接口属性)。 如果还是没看明白就接着往下看,看一看PLC置位复位程序的执行就明白了。图3如图3,这个是PLC置位复位程序的置位执行步骤,1,外部常开按钮没有按下时I0.0没有接通,Q0.1置位线圈就没有输出。2,外部常开按钮按下时I0.0接通,Q0.1置位线圈就有了输出。
 西门子CPU模块
西门子CPU模块- 西门子200CN热电阻输
- PLC/CPU模块
- 方祖付
西门子200CN热电阻输信息
-
 甘南旧手表回收价格甘南回收名表万国快速上门¥ 99999
甘南旧手表回收价格甘南回收名表万国快速上门¥ 99999 -
 杭州内环氧粉末涂塑外加强级3PE防腐钢管生产厂家量大从优¥ 36
杭州内环氧粉末涂塑外加强级3PE防腐钢管生产厂家量大从优¥ 36 -
 丹东小型燃气蒸汽锅炉-燃气蒸汽锅炉厂面议
丹东小型燃气蒸汽锅炉-燃气蒸汽锅炉厂面议 -
 电动扫路车批发代理,多功能扫路车¥ 158000
电动扫路车批发代理,多功能扫路车¥ 158000 -
 滁州JUKI贴片机RS-1R,smt贴片机面议
滁州JUKI贴片机RS-1R,smt贴片机面议 -
 监控摄像头安装方案三盾弱电,监控摄像头三盾弱电¥ 120
监控摄像头安装方案三盾弱电,监控摄像头三盾弱电¥ 120









