







产品单价 |
168.00元/186 |
起订量 |
1186 |
供货总量 |
500 186 |
发货期限 |
自买家付款之日起1天内发货 |
品牌 |
西门子 |
型号 |
PLC模块 |
6SN1146-1AB00-0BA1 西门子电源模块6SN1146-1AB00-0BA1 西门子电源模块
远程分布式10ET200SP介绍:
西门子PLCS7-1500系列,为中大型自动化控制提供了解决方案。在这种自动化投制中,特点是设备众多,控制点分傲,通讯距离远,因此在控制中经常需要运用分布式1/0模块.通过分布式1/0组成的控制,为用户解决了如需要远距离数设电缆,通讯中断,控制不合理等问题。
本文下面对分布式1/0摸块中的一种-ET200SP的特点和站点组成做一个简介,让用户对西门子分布式1/0模块进行配置时参考。
西门子 PLC S7-1500系列在使用中, 用户根据需求有时会配置分布式1/0 ET200SP 来进行扩展 ,ET200SP 的特点和组成如下
1.ET200SP 特点 电源(PS电源)通过U形连接器连接到CPU模块,模块,接口模块等,需要在硬件组态中进行配置;负载电源(PM电源)不通过U形连接器连接到其他模块,而是直接通过线缆连接相应端子,因此负载电源(PM电源)无需在硬件组态里进行配置。 WINCC通过PCACCESSOPC与S7-200(ART200)通讯步骤,接口道PCADAPTER(PPI),联机搜索到CPU更新项目中的plc类型。建立符号表变量,连接到MW0。另外将符号表的原中文表名改为英文。
西门子分布式1/0摸块 ET200SP 是新一代分布式1/0, 它的体积更小小 , 使用更加灵活 ,性能更加:
(1)防护等级IP20 , 支持PROFIN盯利用OFIBUS DP 通讯
(2)ET200SP 的各种模块用户可以进行随意组合,并且具有更加紧凑的设计,单个模块多支持16通道, 方便用户进行设计和扩展
(3)由于设计采用式端子, 用户不需要工具就可以完成接线, 了工作效率, 另外模块和基座的组装更方便快捷
(4)各个负载电势组的形成无需PM-E 电源模块,为用户节约了成本;
(5)控制在运行中, 用户可以更换模块, 这种不需要停机的操作的了效率
(6)用户对 ET200SP 编程组态时, 可以通过新一代 TIA 博途软伶或者 Step7 VS.5 ,操作简单,了准确率。
初始化0、1或2HSC1为内部方向控制的单相增/减计数器(0、1或2),初始化步骤如下:1.用初次扫描存储器位(0.1=1)调用执行初始化操作的子程序。由于采用了这样的子程序调用,后续扫描不会再调用这个子程序,从而了扫描时间,也提供了一个结构的程序。
2. ET 200SP 站点组成
西门子分布式1/0摸块 ET200SP 使用DIN导轨进行安装, 如果用户需要配置它的站一般包含如下配置:
(1)具有支持 PROFINET 或 PROFIBUS DP 通讯的 IM 通讯接口模块;
(2)用户根据项目需求配置各种1/0摸块, 功能模块以及它们所对应的基座单元;
(3)如果需要的话,右侧可以添加用于完成配置的服务模块;
综上所述,西门子 PLC 分布式1/0单元ET200SP 为西门子PLCS7-1500 提供了很好的扩展,功能. 用户可以根据本文中提供的配置ET200SP模块,来实现对多个设备的控制。
SIMATIC存储卡主要有以下功能:1.作为CPU的装载存储区,离开存储卡CPU就无法运行。2.可以用于更新S7-1500CPU及集中式IO模块的固件版本。3.读取服务数据。一:通过TIASTEP7的操作步骤:1.要设置卡类型,可将SIMATIC存储卡编程设备的读卡器。
练习例子:
CPU1511的变量QD200是一个1=1000之间的递增的数值。ET200SP需要读出CP 57-1511 CPU中变量QD200的值,并将读出的值再次发送到1511CPU的MD200 中
1.在CPU1511的属性中使能远程访问功能。
2. 在盯200SU OB1中调用通信GET,
3.在块参数的属性中配置连接参数。
6SL3040-1MA01-0AA0
6FX5002-2AH00-1AF0
6FX5002-2AH00-1BA0
6ES7314-1AG14-0AB0
6ES7322-1HH01-0AA0
6ES7365-0BA01-0AA0
6ES7288-3AE08-0AA0
6ES7215-1BG40-0XB0
66647-0AE11-3AX0
6ES7222-1BF22-0XB0
6GT2002-1JD00
6GT2891-4FN10
6ES7332-5HD01-0AB0
6ES7321-1BL00-0AA0
6SW1700-5AD00-1XX0
6ES7313-5BG04-0AB0
6ES7322-1BH01-0AA0
6ES7953-8LL31-0AA0
6ES7390-1AF30-0AA0
6ES7901-3DB30-0XA0
6ES7315-2AH14-0AB0
6ES7953-8LL31-0AA0
6ES7322-1BH01-0AA0
6ES7131-6BH00-0BA0
6ES7193-4CA50-0AA0
6ES7138-4CA01-0AA0
6ES7193-4CD20-0AA0
6ES7131-4BF00-0AA0
6ES7132-4BF00-0AA0
66647-0AE11-3AX0
6GK1571-0BA00-0AA0
6SL3210-5BE31-8UV0
6SL3210-5BE27-5UV0
6FX3002-5CL01-1CA0
6FX3002-2DB10-1CA0
6FX3002-5BL02-1CA0
6FC5370-0AA00-2AA1
6ES7307-1EA01-0AA0
6ES7390-1AE80-0AA0
6XV1830-0EH10
6ES7972-0BA12-0XA0
6ES7972-0BA12-0XA0
66645-0BA15-2AX0
6EP1332-1SH43
6ES7153-1AA03-0XB0
6ES7151-1AA05-0AB0
6SL3210-5BB13-7UV1
6ES7307-1EA01-0AA0
66648-0CC11-3AX0
6ES7901-3DB30-0XA0
6SL3054-7EH00-2BA0
A5E00444764
A5E01105817
6ES7288-1SR20-0AA0
6FX3002-5CL01-1BA0
6FX3002-2CT10-1BA0
6SL3210-5FE10-4UA0
1FL6042-1AF61-0AA1
6ES7288-5AE01-0AA0
6ES7222-1HF22-0XA8
6GK7343-1CX10-0XE0
6ES7134-4GB01-0AB0
6EP1333-2BA20
66648-0CC11-3AX0
6ES7131-4GB01-0AB0
6ES7135-4FB01-0AB0
6ES7138-4FA05-0AB0
6ES7288-3AQ04-0AA0
6ES7288-1SR40-0AA0
6ES7288-3AR02-0AA0
6ES7223-1BL32-0XB0
6SE6420-2UD15-5AA1
6EP1332-1SH43
GT1685M-STBD
6SL3055-0AA00-5BA3
6ES7322-1BH01-0AA0
3TF53220XF0
3TF56220XF0
C98043-A1682-L1
6ES7288-5AE01-0AA0
6SE6420-2UD21-1AA1
66647-0AC11-3AX0
6GK1500-0FC10
6ES7953-8LJ31-0AA0
6ES7214-2BD23-0XB8
66641-0BA11-0AX1
6SL3054-7EH00-2BA0
6ED1052-1MD00-0BA8
7MH4930-0AA01
6ES7214-2AD23-0XB8
6FX2001-2QF00
6ES7288-3AT04-0AA0
66648-0CC11-3AX0
6ES7138-6BA00-0BA0
所谓手自动勿扰S7-200 ART PLC切换,是指在将PID回路从手动切换到自动,或者是自动切换的手动时,PID输出不会发生跳变,也就是不会产生任何波动。本文阐述内容主要以中的PID功能为实例。
一、PID 自动/手动调节的无扰动切换
有些工程项目中可能需要根据工艺要求在不同的时刻投入、或者退出 PID 自动控制;退出 PID 自动控制时,控制器的输出部分可以由操作人员直接手动控制。这就是所谓的 PID 手动/自动切换。
PID 控制处于自动时,PID 控制器(以S7-200 ART 中的 PID 调节为例)会按照 PID 算法,自动通过输出的作用使反馈值跟随给定值变化,并保持。这是一个自动的闭环控制。操作人员可以根据现场工艺的要求,改变给定(即设定值)的值。
PID 控制处于手动时,PID 控制器不再起自动计算的作用。这时,控制回路的输出是由操作人员手动控制、,由操作人员观察现场的控制效果,从而构工闭环控制。
所谓 PID 自动/手动控制,就是看控制的输出是由 PID 控制器自动控制,还是由操作人员手动控制。
有些控制的执行机构不能承受较大的冲击,这就要求在进行 PID 自动/手动切换时,保持控制输出的。这就是要求无扰动切换。为了达到 PID 自动/手动控制的无扰动切换,需要在编程时注意一些相关事项。下面分别就直接使用 PID 指令编程,和使用 PID 向导编程两种情况作一介绍。
二、直接使用 PID 指令编程时的 PID 自动/手动无扰切换
直接使用 PID 指令块编写 PID 控制程序时,可以简单地使用“调用/不调用”指令的控制自动/手动。因为 PID 指令本身已经具有实现无扰动切换的能力,此时在 PID 指令控制环节之外编程没有多大必要。
PID 指令的 EN 输入端使能(为“1”)时,我们认为是自动控制;EN 输入端未使能(为“0”)时,我们认为是手动控制。PID 指令本身有一个“能流历史状态位”,以记录指令的状态切换。在 EN 端从“0”变为”“1”时,PID 指令认为这是从“手动”向“自动”切换。PID 指令此时会自动执行一系列,以配合无扰动切换:
使设定值( SPn) = 当前反馈变量(PVn)设置上次采样变量(PVn-1) = 当前反馈变量(PVn)设置积分偏差和(或所谓积分前项)(Mx) = 当前输出值(Mn)
使设定值等于当前反馈值可以避免出现偏差,使之不存在的要求;当然如果有工艺要求,也可以后续设定值。其他的都是为了使 PID 在后续的操作中不改变输出的值。
在编程时要注意:
从自动向手动切换时,PID 指令的 EN 端不再有能流,计算停止,输出值 Mn 不再变化。此时如果需要操作人员人工观察控制的结果,手动控制输出量,就可以通过用户程序直接改变回路表中的输出值存储单元内容(见数据块或手册的相关部分内容)。如果有必要,操作人员的操作可能要进行一些化换算。为从手动向自动的切换无扰动,需要在手动控制时,或在切换中,禁止对 PID 回路表中设定值的更新,以便切换时 PID 指令用当前反馈值替代设定值。切换完成后,操作人员可以设定值。
三、使用 PID 向导编程时的 PID 自动/手动无扰切换
使用 PID 指令向导编程时,指令向导会自动调用 PID 指令,并且编写的控制变量化换算、定时采样等功能。用户在使用 PID 指令向导时,需要在用户程序中用 0.0 调用指令向导生成的子程序(如 PIDx_CTRL 子程序)。PID 向导可以生成带自动/手动切换功能的子程序,这个子程序使用一个数字量点为“1”、“0”的状态来控制是否投入 PID 自动控制。
到目前为止(STEP 7-Micro/WIN ART),使用 PID 向导生成的子程序时,由于用户程序不能直接使用 PID 指令,它的无扰切换能力因为隔了外壳子程序,所以受到了局限。如果对无扰切换要求比较严格,需要另外编一些程序加以处理。但在一点的PLC中,无扰动切换功能只需打个勾即可。对于ART来说则不能这么简单了。
S7-200ART中,考察如下 PID 控制子程序:
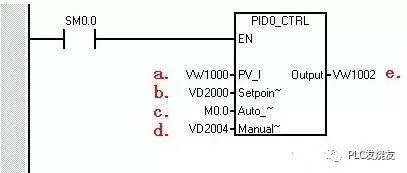
图 1. PID 向导生成的指令
图中:a、反馈量 ;b、设定值,实数 ;c、自动/手动控制,“1”=自动,“0”=手动 ;d、手动控制输出值,0.0 - 1.0 之间的一个实数;e、PID 控制输出值。
要实现无扰动切换,:
在从自动向手动切换时,使手动输出值(VD2004)等于当前的实际控制输出值;在从手动向自动切换时,使设定值相当于当前的反馈值。
为此,可编写类似下图所示的程序, PID 控制子程序之前:
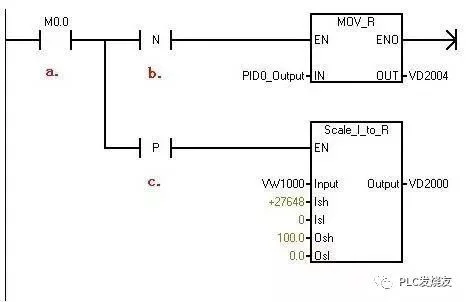
图 2. 无扰切换处理程序
图中:
a、自动/手动切换控制点 ;
b、从自动向手动切换时,使手动输出值等于实际当前值 ;
c、从手动向自动切换时,把当前反馈量换算为相应的给定值 。

| 上海地友自动化设备有限公司 | |||
|---|---|---|---|
| 联系人 | 方祖付 |
微信 | 无 |
| 手机 | | 邮箱 | 2798596102@qq.com |
| 传真 | 021-60441303 | 地址 | 上海市松江区新浜镇林天花苑北区80号402 |
| 主营产品 | 机电设备,电气设备,数控设备,自动化设备 | 网址 | http://fangzufu.b2b.huangye88.com/ |